11. Vector Spaces of Least Squares and Linear Equations
Michael Friendly, Georges Monette, John Fox, Phil Chalmers
2024-11-24
Source:vignettes/aB-data-beta.Rmd
aB-data-beta.RmdThis vignette illustrates the relationship between simple linear regression via least squares, in the familiar data space of and an equivalent representation by means of linear equations for the observations in the less familiar space of the model parameters in the model .
In data space, we probably all know that the least squares solution can be visualized as a line with intercept and slope . But in space, the same solution is the point, .
There is such a pleasing duality here:
- A line in data space corresponds to a point in beta space
- A point in data space corresponds to a line in beta space
But wait, there’s one more space: observation space, the n-dimensional space for n observations. These ideas have a modern history that goes back to Dempster (1969). It was developed in the context of linear models by Fox (1984) and Monette (1990). Some of these geometric relations are explored in a wider context in Friendly et al. (2013).
Data space
We start with a simple linear regression problem, shown in data space.
x <- c(1, 1, -1, -1)
y <- 1:4Fit the linear model, y ~ x. The intercept is
b0 = 2.5 and the slope is b1 = -1.
(mod <- lm(y ~ x))
##
## Call:
## lm(formula = y ~ x)
##
## Coefficients:
## (Intercept) x
## 2.5 -1.0Plot the data and the least squares line.
par(mar=c(4,4,1,1)+.1)
plot(y ~ x, pch=16, cex=1.5)
abline(mod, lwd=2)
abline(h = coef(mod)[1], col="grey")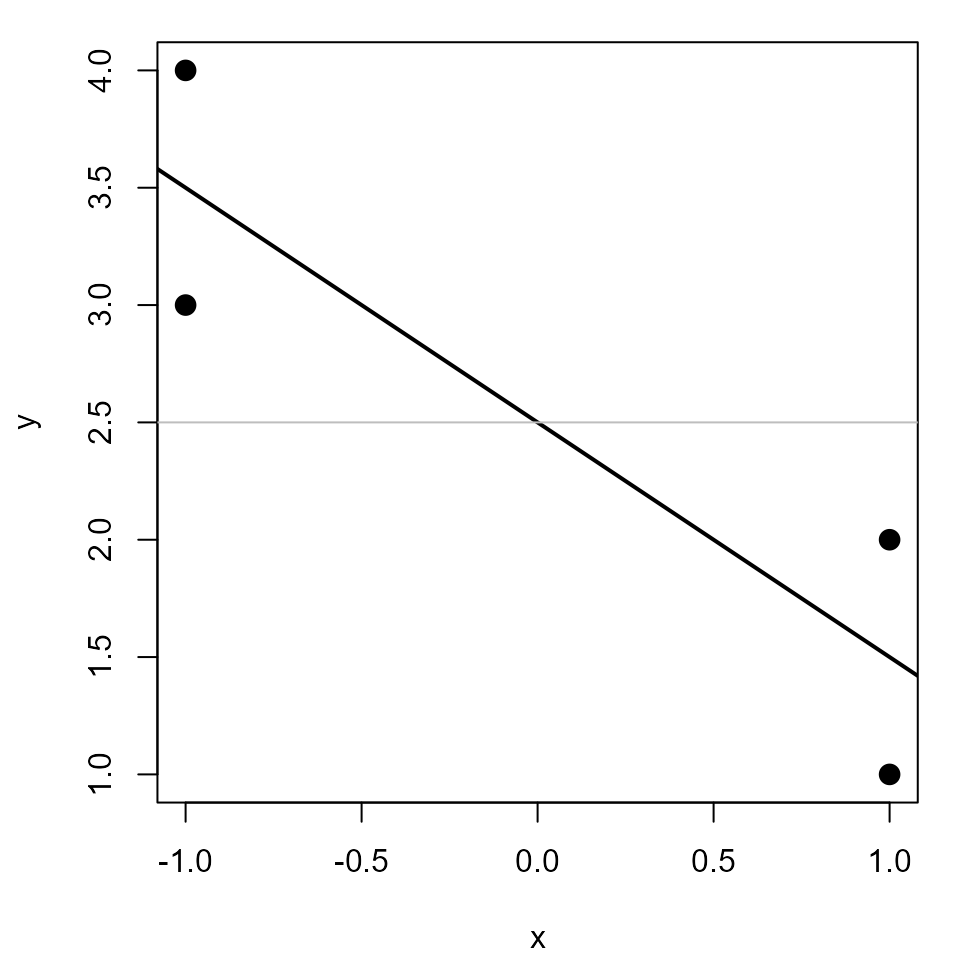
A plot showing 4 points in data space and the linear regression line
Linear equation () space
This problem can be represented by the matrix equation, .
X <- cbind(1, x)
printMatEqn(y, "=", X, "*", vec(c("b0", "b1")), "+", vec(paste0("e", 1:4)))
## y X
## 1 = 1 1 * b0 + e1
## 2 1 1 b1 e2
## 3 1 -1 e3
## 4 1 -1 e4Each equation is of the form . The least squares solution minimizes .
We can also describe this a representing four equations in two
unknowns, c("b0", "b1").
showEqn(X, y, vars=c("b0", "b1"), simplify=TRUE)
## b0 + b1 = 1
## b0 + b1 = 2
## b0 - 1*b1 = 3
## b0 - 1*b1 = 4Each equation corresponds to a line in
space. Let’s plot them. plotEqn draws a point at the
intersection of each pair of lines — a solution for that pair of
observations.
plotEqn(X, y, vars=c("b0", "b1"), xlim=c(-2, 4))
## b0 + b1 = 1
## b0 + b1 = 2
## b0 - 1*b1 = 3
## b0 - 1*b1 = 4Each point in data space corresponds to a line in “beta” space. The figure shows the four lines corresponding to the points in the previous figure.
In this space, not all observation equations can be satisfied simultaneously, but a best approximate solution can be represented in this space by the coefficients of the linear model , where the intercept is already included as the first column in .
plotEqn(X, y, vars=c("b0", "b1"), xlim=c(-2, 4))
## b0 + b1 = 1
## b0 + b1 = 2
## b0 - 1*b1 = 3
## b0 - 1*b1 = 4
solution <- lm( y ~ 0 + X)
loc <- coef(solution)
points(x=loc[1], y=loc[2], pch=16, cex=1.5)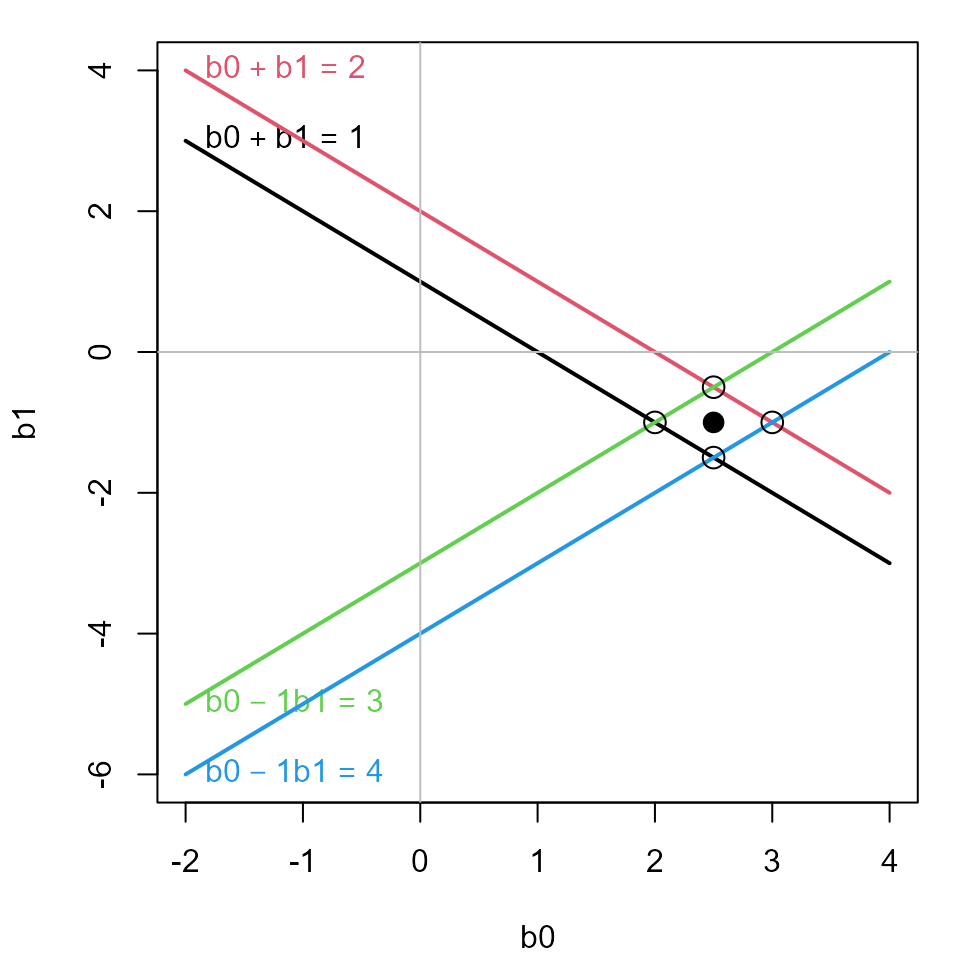
The LS solution is shown by the black point, corresponding to .
Observation space
There is also a third vector space, one where the coordinate axes
refer to the observations,
,
with data
.
The
-length
vectors in this space relate to the variables y and
predictors x1, x2 … . Here,
x0 is the unit vector, J(n), corresponding
to the intercept in a model. For
observations, this space has
dimensions.
In the case of simple linear regression, the fitted values,
correspond to the projection of
on the plane spanned by
,
or yhat <- Proj(y, c(bind(x0, x1))).
In this space, the vector of residuals, is the orthogonal complement of , i.e., . Another geometrical description is that the residual vector is the normal vector to the plane.
This space corresponds to the matrix algebra representation of linear regression,
In fact, the least squares solution can be derived purely from the requirement that the vector is orthogonal to the vector of residuals, , i.e., . (The margins of this vignette are too small to give the proof of this assertion.)
Observation space can be illustrated in the vector diagram developed
below, but only in
dimensional space, for an actual data problem. Here, we create
x0, x1 and y for a simple
example.
O <- c(0, 0, 0) # origin
x0 <- J(3) # intercept
x1 <- c(0, 1, -1) # x
y <- c(1, 1, 4) # y
y <- 2 * y / floor(len(y)) # make length more convenient for 3D plotThis implies the following linear equations, ignoring residuals.
X <- cbind(x0, x1) # make a matrix
showEqn(X, y, vars=colnames(X), simplify=TRUE)
## x0 = 0.5
## x0 + x1 = 0.5
## x0 - 1*x1 = 2To display this in observation space,
- First create a basic 3D plot showing the coordinate axes.
- Then, use
vectors3d()to draw the vectorsx0,x1andy. - The plane spanned by
x0, andx1can be specified as as the normal vector orthogonal to both, using the newmatlib::xprod()function. - Finally, we use
Proj()to find the projection ofyon this plane.
win <- rgl::open3d()
# (1) draw observation axes
E <- diag(3)
rownames(E) <- c("1", "2", "3")
vectors3d(E, lwd=2, color="blue")
# (2) draw variable vectors
vectors3d(t(X), lwd=2, headlength=0.07)
vectors3d(y, labels=c("", "y"), color="red", lwd=3, headlength=0.07)
# (3) draw the plane spanned by x0, x1
normal <- xprod(x0, x1)
rgl::planes3d(normal, col="turquoise", alpha=0.2)
# (4) draw projection of y on X
py <- Proj(y, X)
rgl::segments3d(rbind( y, py)) # draw y to plane
rgl::segments3d(rbind( O, py)) # origin to py in the plane
corner( O, py, y, d=0.15) # show it's a right angle
arc(y, O, py, d=0.2, color="red")This plot is interactive in the HTML version. Use the mouse wheel to expand/contract the plot. Drag it to rotate to a different view.
You can also spin the plot around it’s any axis or create a movie, but that isn’t done in this vignette.
For comparison, we can also show the least squares solution in data or space. Here it is in linear equation () space.
X <- cbind(x0, x1)
plotEqn(X, y, vars=c("b0", "b1"), xlim=c(-2, 4))
## b0 = 0.5
## b0 + b1 = 0.5
## b0 - 1*b1 = 2
solution <- lm( y ~ 0 + X)
loc <- coef(solution)
points(x=loc[1], y=loc[2], pch=16, cex=1.5)
abline(v=loc[1], lty=2)
abline(h=loc[2], lty=2)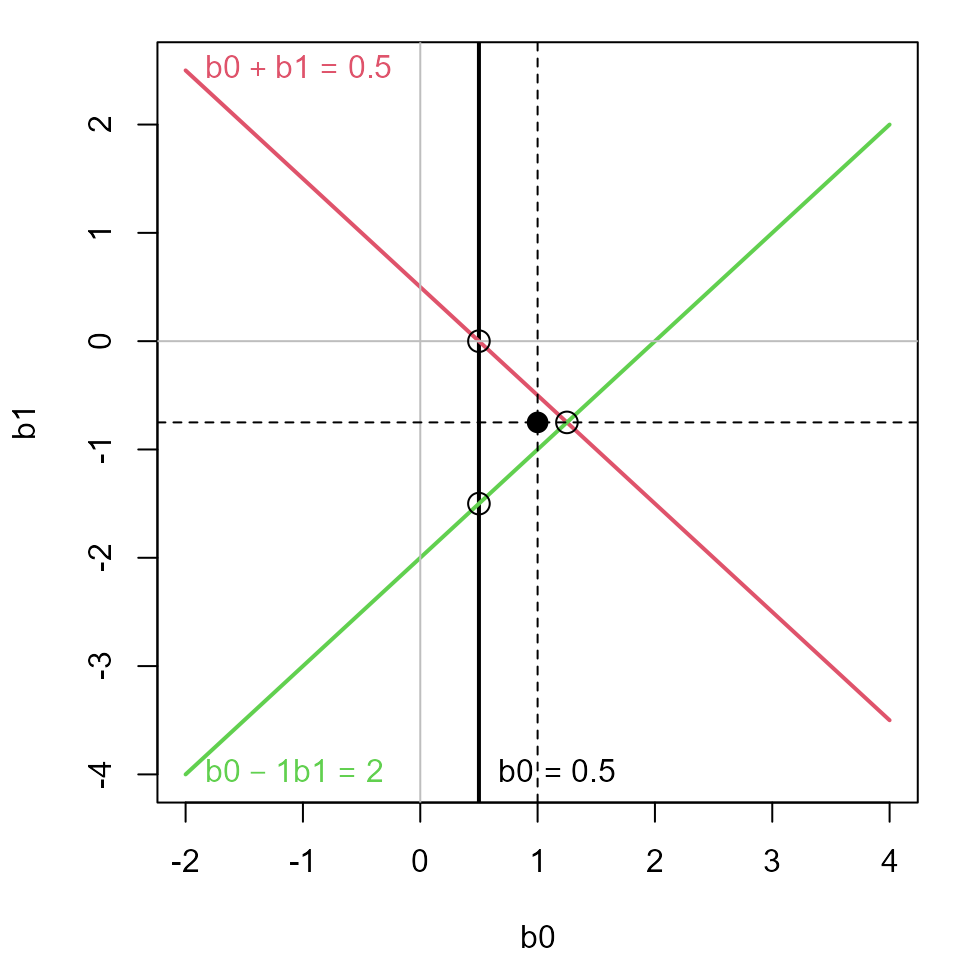
References
Dempster, A. P. (1969). Elements of Continuous Multivariate Analysis, Addison-Wesley,
Fox, J. (1984). Linear Statistical Models and Related Methods. NY: John Wiley and Sons.
Friendly, M.; Monette, G. & Fox, J. (2013). Elliptical Insights: Understanding Statistical Methods Through Elliptical Geometry Statistical Science, 28, 1-39.
Monette, G. (1990). “Geometry of Multiple Regression and Interactive 3-D Graphics” In: Fox, J. & Long, S. (Eds.) Modern Methods of Data Analysis, SAGE Publications, 209-256